touch&fold: a foldable haptic actuator for rendering touch in mixed reality

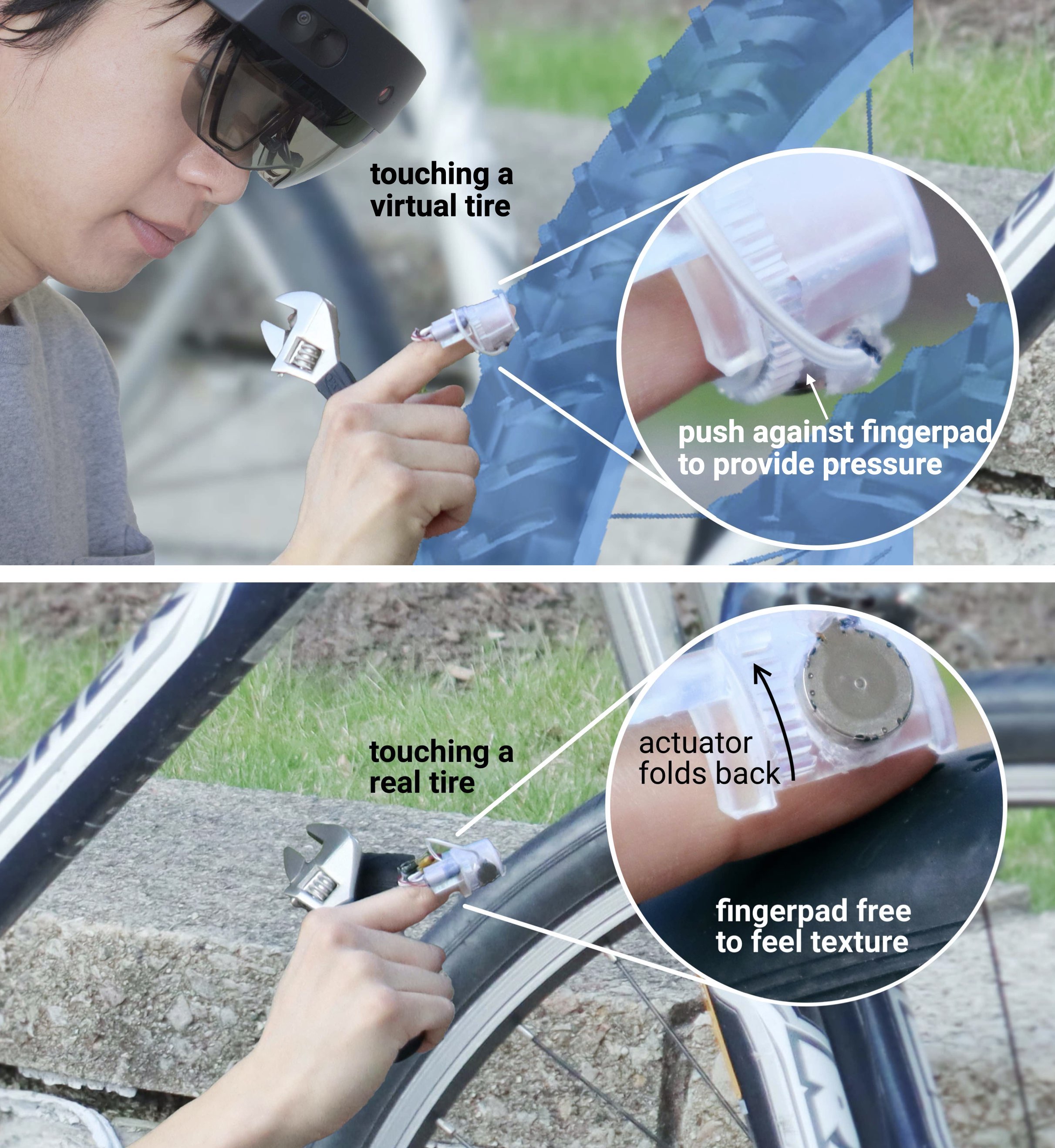
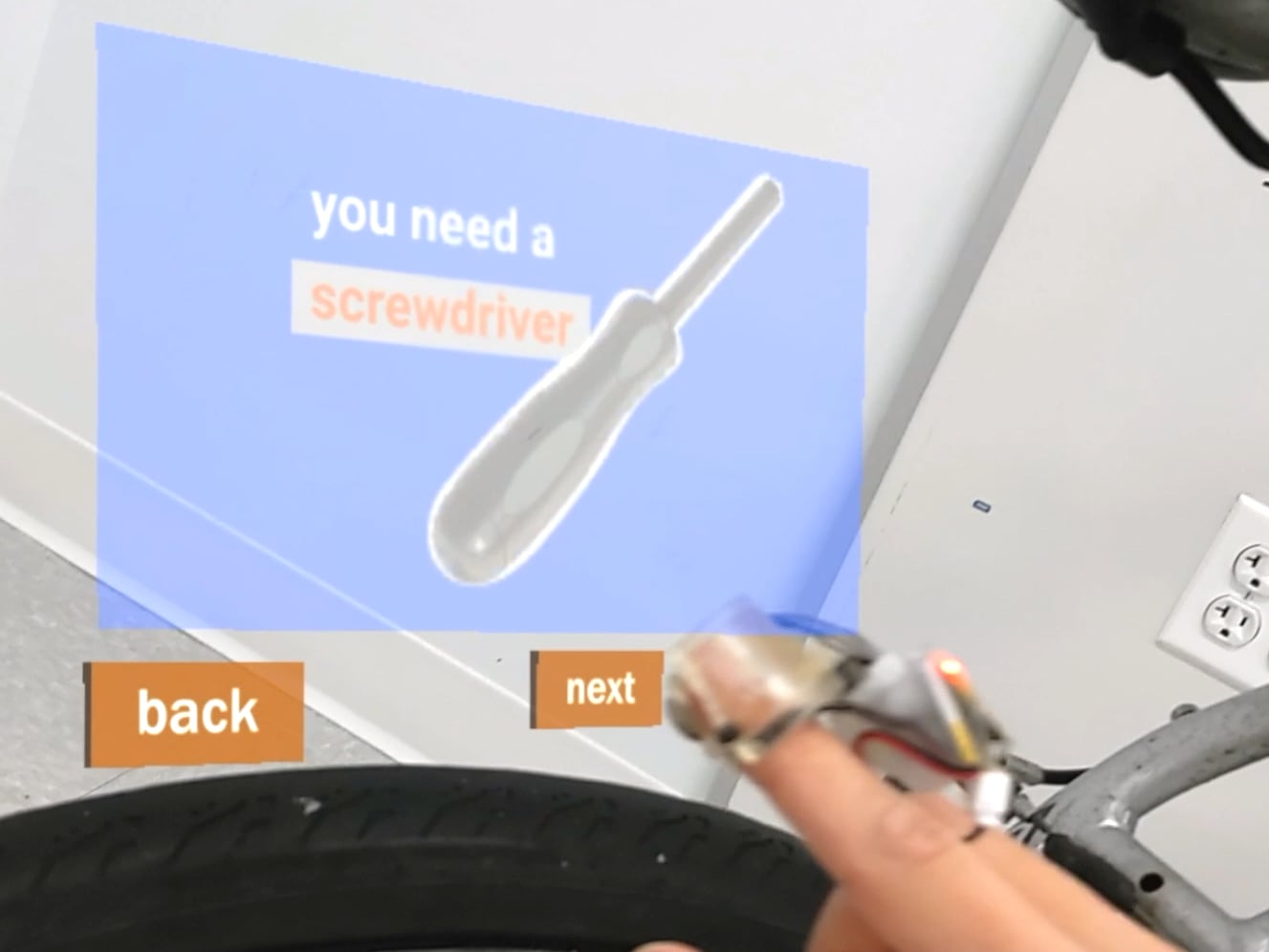
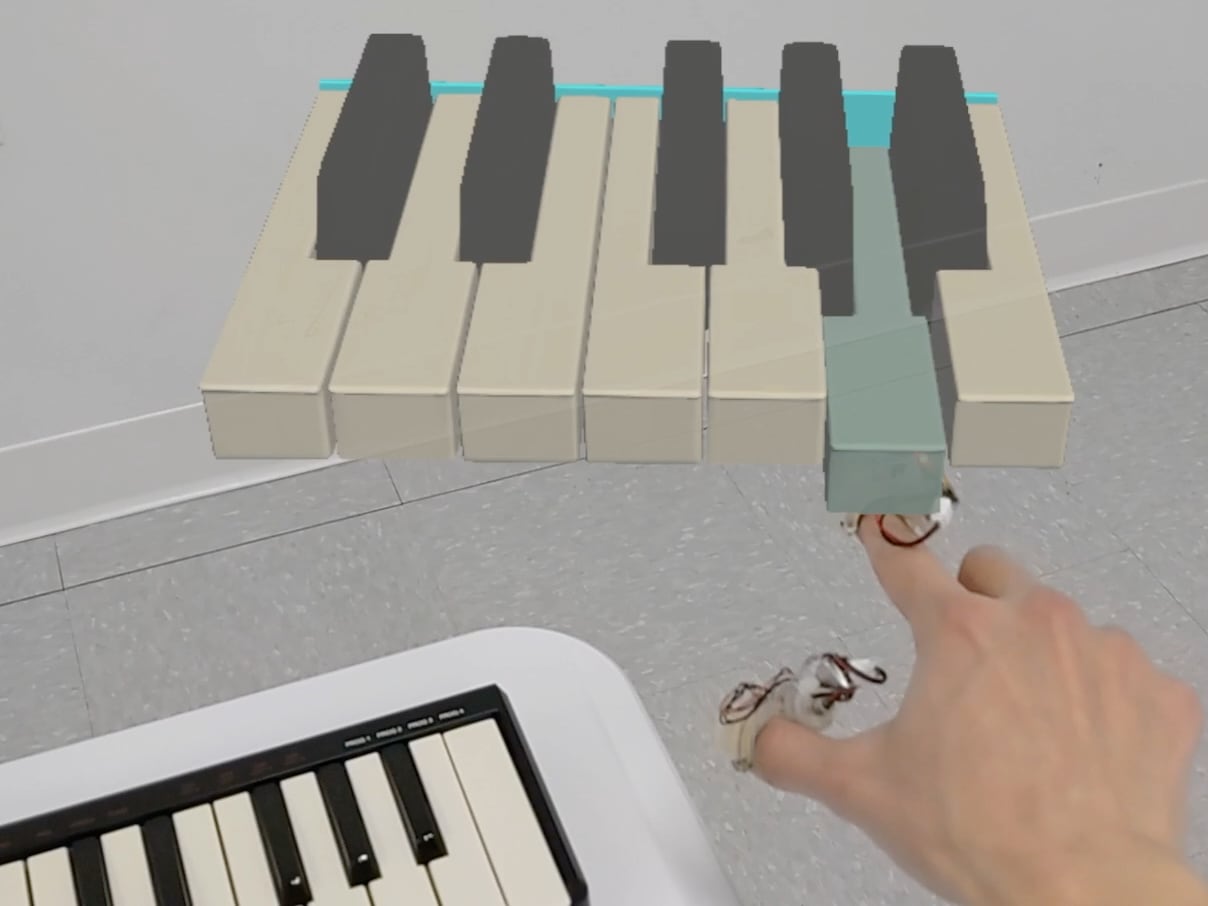
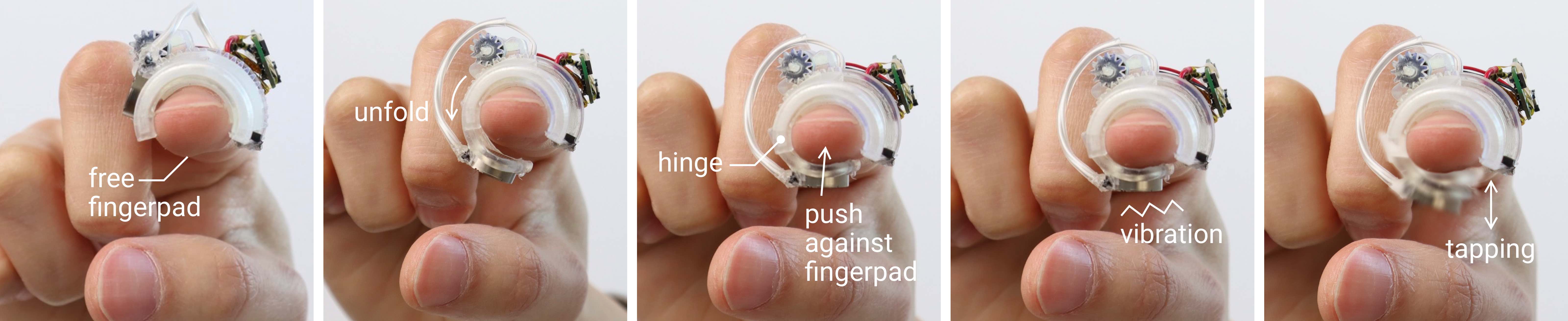
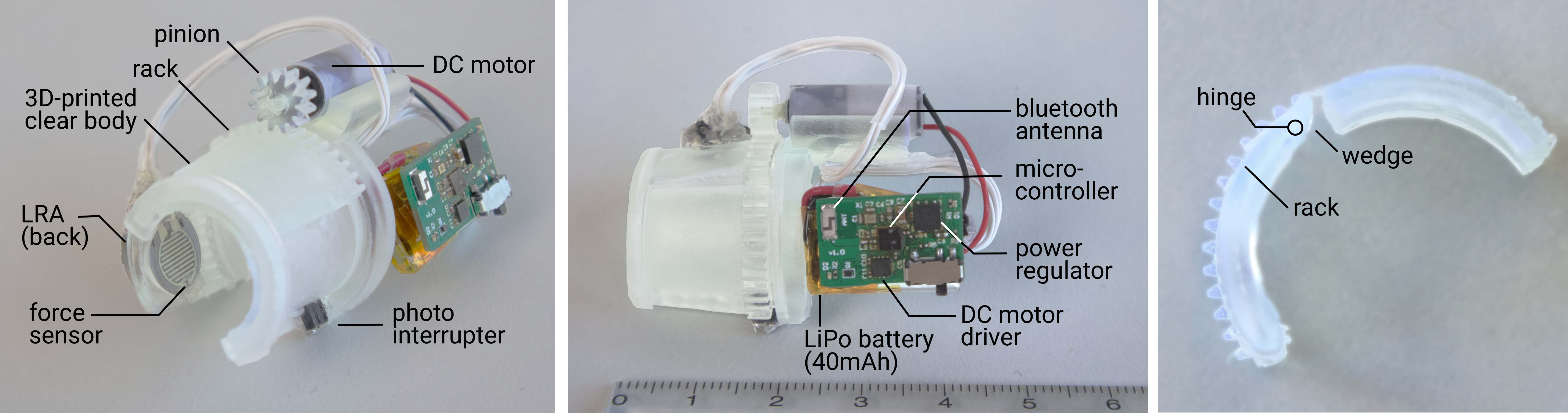
We propose a nail-mounted foldable haptic device that provides tactile feedback to mixed reality (MR) environments by pressing against the user’s fingerpad when a user touches a virtual object. What is novel in our device is that it quickly tucks away when the user interacts with real-world objects. Its design allows it to fold back on top of the user’s nail when not in use, keeping the user’s fingerpad free to, for instance, manipulate handheld tools and other objects while in MR. To achieve this, we engineered a wireless and self-contained haptic device, which measures 24×24×41 mm and weighs 9.5 g. Furthermore, our foldable end-effector also features a linear resonant actuator, allowing it to render not only touch contacts (i.e., pressure) but also textures (i.e., vibrations). We demonstrate how our device renders contacts with MR surfaces, buttons, low- and high-frequency textures. In our first user study, we found that participants perceived our device to be more realistic than a previous haptic device that also leaves the fingerpad free (i.e., fingernail vibration). In our second user study, we investigated the participants’ experience while using our device in a real-world task that involved physical objects. We found that our device allowed participants to use the same finger to manipulate handheld tools, small objects, and even feel textures and liquids, without much hindrance to their dexterity, while feeling haptic feedback when touching MR interfaces.




recorded talk
| Authors | Shan-Yuan Teng, Pengyu Li, Romain Nith, Joshua Fonseca, Pedro Lopes (University of Chicago) |
| Publication | Shan-Yuan Teng, Pengyu Li, Romain Nith, Joshua Fonseca, Pedro Lopes. 2021. Touch&Fold: A Foldable Haptic Actuator for Rendering Touch in Mixed Reality. In Proceedings of the 2021 CHI Conference on Human Factors in Computing Systems (CHI ‘21). Association for Computing Machinery, New York, NY, USA, Article 736, 1–14. https://doi.org/10.1145/3411764.3445099 |
| Award | 🏅 CHI ‘21 Best Paper Honorable Mention Award |
| Paper | PDF (4MB) |
| Open Source | Hardware schematics & 3D models |